科普小知识 | 螺旋桨式风速风向传感器之工作原理

01 风速的测量工作原理
螺旋桨式风速传感器是通过测量风力对一个螺旋桨的驱动力来计算风速,其主要由螺旋桨、磁钢转子、感应元件、处理电路等部分组成。螺旋桨叶片系统受到风压的作用,产生一定的扭力矩,使叶片旋转,带动螺旋桨轴上的磁力脉冲发生器旋转。螺旋桨的转速与风速成正比关系,其公式为:
V风速=转子转速×风速系数 (1-1)
风速系数是螺旋桨的物理特性,螺旋桨确定形状后,其风速系数是一个常量。磁性转子通过霍尔元件或感应线圈输出风速模拟信号,通过处理电路处理后可输出频率正比于风速的方波信号。
1.1 电磁感应原理
根据电磁感应定律,将一个线圈置于一个变化的磁场中,就会产生感应电压,称为感生电动势,其计算公式为:

(1-2)
式中:
N——线圈匝数;
φ——磁通量;
B——磁场强度;
S——线圈面积。
当磁场以角速度ω旋转时,感应电动势为:

(1-3)
其最大值为:
(1-4)
根据公式(1-3)和(1-4)可知,在一个磁场旋转中,磁场每旋转一周就会产生一个交流正弦波信号,其最大值为NBSω。为消除杂波干扰,使风速传感器在低风速时也能产生足够大的感应电压,应选择合适的磁铁和线圈匝数和线圈截面积,尽可能在低速旋转时使线圈中产生足够大的感应电压。在线圈中插入一根铁棒,将能有效的增强磁感应强度。
图1是根据电磁感应原理设计的一种风速传感器,其中磁铁为6磁极磁铁,当叶片系统受到风压的作用旋转时,带动螺旋桨轴上的六磁极磁盘旋转,线圈中即感应出交流正弦波信号,其频率与螺旋桨的转速成正比,螺旋桨每转一周,线圈中就感应出三个周期的正弦波信号。经过电路板信号放大和整形,输出频率正比于风速的方波信号。
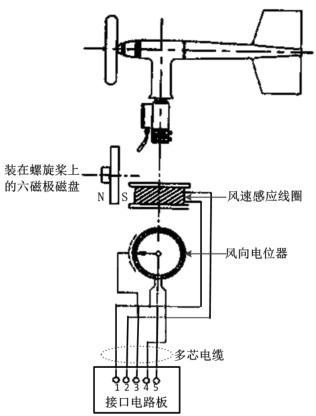
图1 根据电磁感应原理设计的风速传感器
1.2 霍尔效应原理
当一块通有电流的金属或半导体薄片垂直地放在磁场中时,薄片的两端就会产生电位差,这种现象就称为霍尔效应。这个电位差的大小与磁场强度和电流成正比,方向与磁场方向和电流方向有关。
霍尔元件是一种基于霍尔效应的磁传感器。当磁体离开霍尔元件的范围时,磁场的强度减弱,霍尔元件的电压也随之变小。相反,当磁体靠近霍尔元件时,磁场的强度增强,霍尔元件的电压也随之增大。通过对霍尔元件两侧电压的检测,可以判断磁体的位置和运动状态。按照霍尔元件的功能可将它们分为:霍尔线性器件和霍尔开关器件。风速风向传感器主要应用霍尔开关来计算螺旋桨转速。
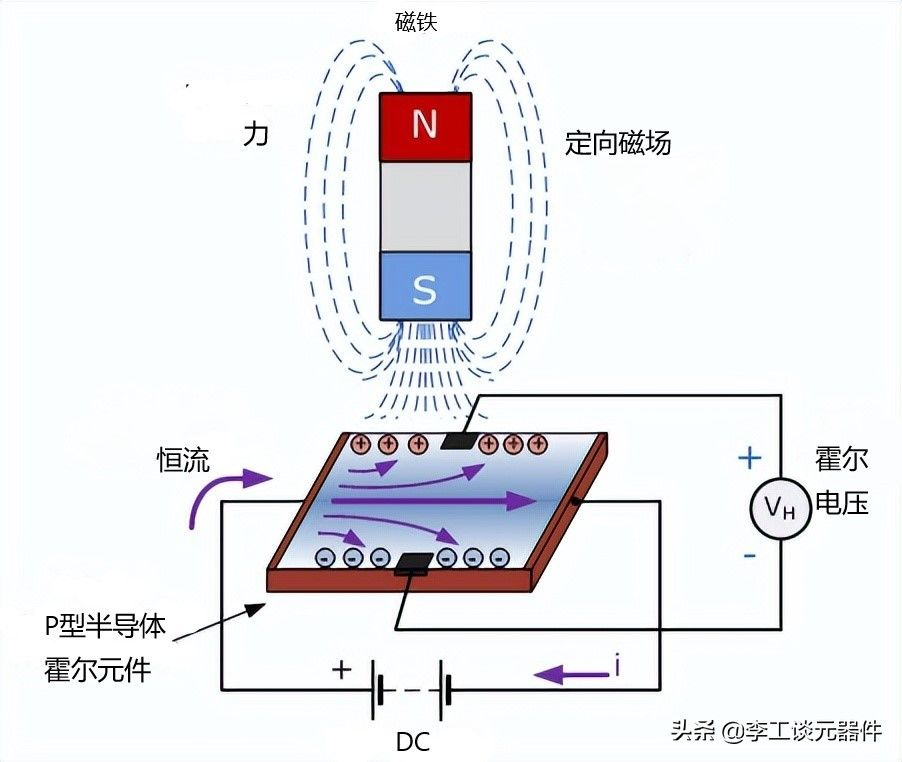
图2 霍尔元件原理图
霍尔开关内部集成的电路把磁输入信号转换成开关量电信号输出,它同时具备符合实际应用要求的易操作性和高可靠性。霍尔开关的输入端是以磁感应强度B来表征的,当B值达到一定的程度时,开关内部集成的触发器翻转,其输出电平状态也随之翻转。风速风向传感器中选用的霍尔开关一般为单极霍尔开关,单极霍尔开关需要指定一个磁极,当磁场靠近时霍尔导通输出低电平,磁场远离时霍尔关闭输出高电,而另一磁极始终高电平。
如图3所示,其中Bop为工作点“开”的磁感应强度,BRP为释放点“关”的磁感应强度。当外加的磁感应强度超过动作点Bop时,传感器输出低电平,当磁感应强度降到动作点Bop以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bop与BRP之间的滞后使开关动作更为可靠。
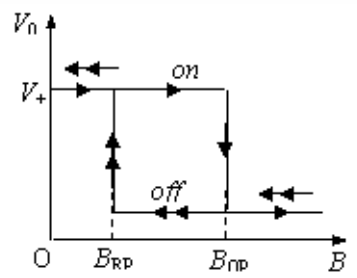
图3 霍尔开关特性
图4是依据霍尔效应原理,采用霍尔开关元件设计的风速传感器,其中磁铁为6磁极磁铁,N极触发。当叶片系统受到风压的作用旋转时,带动螺旋桨轴上的磁力脉冲发生装置旋转,霍尔开关根据感应到的磁强度动作,输出方波信号,其频率与螺旋桨的转速成正比,螺旋桨每转一周,霍尔开关就输出三个的方波信号。
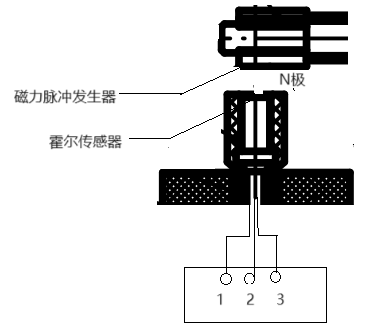
图4 根据霍尔效应设计的风速风向传感器
1.3 光电开关原理
槽型光电开关是红外线发射器和红外线接收器于一体的光电传感器,其发射器和接收器分别位于U型槽的两边,并形成一光轴,当被检测物体经过U型槽且阻断光轴时,光电开关就产生了检测到的开关信号。
风速传感器的核心部分,主要由槽型光电开关管和随风速轴一起旋转的均匀开孔圆盘组成。设隔光圆盘均匀开孔槽数为a,则在槽型光电开关管被施加正常电压后,每当开孔圆盘从光电开关管中间转动一周时,将产生a个脉冲,通过变换电路即可输出脉冲的频率。
02 风向的测量工作原理
2.1 光电式测量风向原理
光电式测量风向原理是基于格雷码编码和光电传感技术。格雷码是一种二进制编码方式,相邻两个数值之间只有一位不同。这种编码方式的优点是在数值变化过程中,只有一位发生变化,可以减少传输错误和干拢的可能性。例如,从0到1的转换只有一位发生变化,从1到2换也只有一位发生变化,依此类推。
格雷码风向传感器利用了这种编码方式。传感器内部有一个旋转部件,可以根据风向的变化旋转。旋转部件上安装有一个光电传感器,用于检测旋转部件当前的位置。光电传感器可以感知到旋转部件上的标记,标记的数量对应着格雷码的位数。
当旋转部件旋转时,光电传感器会不断检测标记的位置,并将其转换为对应的格雷码。传感器会输出一个格雷码序列,每个格雷码代表旋转部件的一个位置。通过解码格雷码序列,可以确定风向传感器当前的风向。
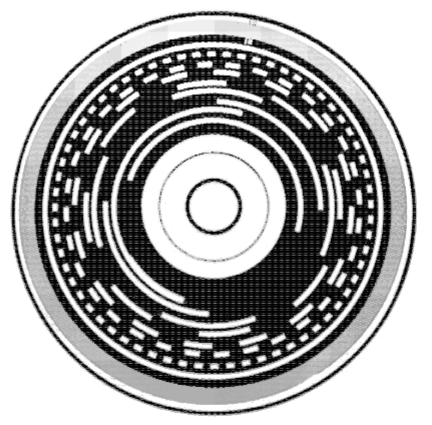
图5 格雷码盘结构示意图
2.2 电阻式测量风向原理
电阻式风向传感器采用类似滑动变阻器的结构,即电位计,它是由一个电阻体和一个转动或滑动系统组成。当电阻体的两个固定触电之间外加一个电压时,通过转动或滑动系统改变触点在电阻体上的位置,在动触点与固定触点之间便可得到一个与动触点位置成一定关系的电压。当风向标产生转动的时候,滑动变阻器的滑杆会随着顶部的风向标一起转动,而产生的不同的电压变化就可以计算出风向的角度或者方向。

图6 电位计
2.3 电子罗盘式测风向原理
电子罗盘是一种基于磁场感应原理工作的设备,用于测量和确定物体的方向。
根据法拉第电磁感应定律,当一个导体在磁场中运动吋,会在导体两端产生感应电动势。电子罗盘利用这个原理来感应地球的磁场。
地球本身就有一个磁场,它的磁力线会从地球的南极指向北极。电子罗盘中的磁感应线圈可以感应到地球磁场的变化,通过测量磁场的强度和方向来测定物体的方位。
电子罗盘将感应到的磁场信号传输到处理器中。处理器会对信号进行放大、滤波和校正等处理,以确保测量的准确性。经过处理后的信号被转换为可视化的输出,通常以数字或指针形式显示方向。
2.4 霍尔角度传感器
霍尔角度传感器是一种用于测量物体角度的传感器,采用霍尔效应原理。当通过一个材料时,由于霍尔效应,会产生一个与外磁场方向垂直的电场,该电场的大小与外磁场的强度成正比。霍尔角度传感器利用这个原理测量外磁场的强度,从而测量物体的角度。
霍尔角度传感器通常由霍尔元件、磁环和信号处理电路组成。在使用时,磁环被安装在旋转的轴上,当旋转轴转动时,磁场会随之改变,霍尔元件检测到这种变化,并将其转化为电信号输出。信号处理电路将这个电信号进行放大、滤波和线性化处理,从而输出一个与物体角度成正比的电信号。
霍尔角度传感器的特性曲线是其输出电压与物体角度之间的关系曲线,通常呈现线性或非线性的形状。在线性霍尔角度传感器中,输出电压与物体角度成线性关系,因此,其特性曲线为一条直线。而在非线性霍尔角度传感器中,输出电压与物体角度之间的关系可能不是线性的,因此,其特性曲线可能为一条曲线。

图7 霍尔角度传感器